Роботизированные дети Pneuborn самостоятельно ползают и ходят
Японские ученые из Университета Осаки (Osaka University) продолжают свою работу над роботизированными моделями детей. Теперь они разработали еще двух роботов-малышей Pneuborn-7II и Pneuborn-13. Эти устройства были презентованы на днях во время международной конференции по робототехнике и автоматизации ICRA 2011 в Шанхае. Роботы-дети представляют собой мышечно-скелетные модели, и они оснащены пневматическими мускулами, играющими роль приводных механизмов. Данные искусственные мышцы обладают возможностью сокращаться на 25% при поступлении сжатого воздуха. Поскольку роботы исполнены из гибких и легких материалов, они могут с легкостью взаимодействовать с окружающей средой без риска повреждений и чрезмерного нагревания.
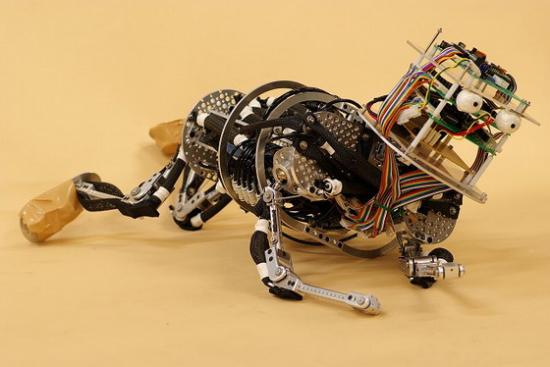
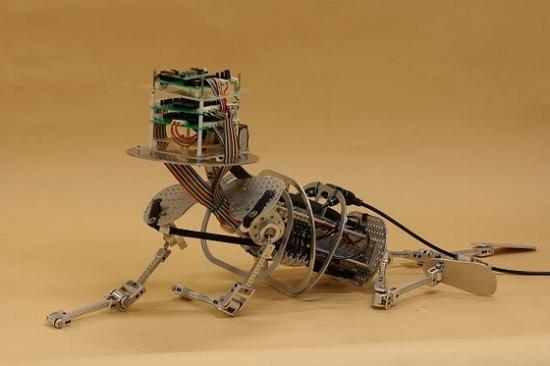
Первая модель, Pneuborn-7II, создавалась по образу 7-месячного ребенка. Благодаря этому роботу исследователи планировали изучать зависимость двигательных умений от конструктивного исполнения робота. Высота Pneuborn-7II составляет 80 см, а весит он 5,4 кг. 19 пневматических мышц отвечают за 26 степеней подвижности. Только в позвоночнике Pneuborn-7II насчитывается три сочленения горизонтальной осью и три сочленения вертикальной осью. Благодаря такой конструкции робот может поворачиваться, сгибаться и растягивать спину. Сам по себе Pneuborn-7II полностью автономен и оснащен микроконтроллерами, аккумулятором, пневматическими клапанами, а также источником сжатого воздуха, точнее, CO2 – в специальном картридже за спиной.

Благодаря соответствующему алгоритму робота научили ползать, при этом были задействованы все встроенные технологии. Это стало возможно даже при отсутствии сенсоров и искусственного интеллекта. Центральные генераторы упорядоченной активности, используемые в Pneuborn-7II, представляют собой некий вид нейронной сети, часто применяемой в робототехнике для создания ритмичных телодвижений. Именно такие генераторы обычно эксплуатируются, когда есть необходимость в реализации простых движений вроде ползания или перекатывания.
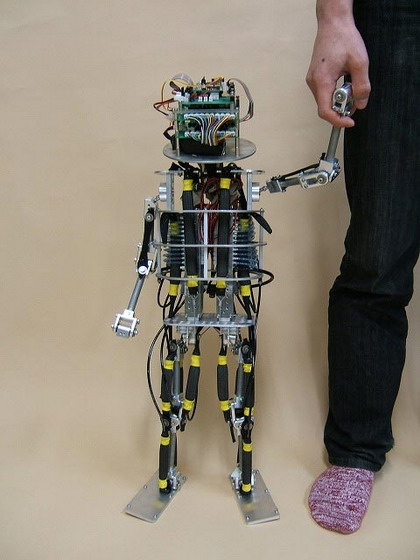
Робот Pneuborn-13, в свою очередь, скопирован с годовалого ребенка. На данной модели ученые хотят изучить воздействие мышечно-скелетной системы на развитие умения ходить на двух ногах. С этой целью в суставах лодыжек, коленей и бедер робота интегрированы 18 пневматических мышц. При росте в 75 см и весе в 3,9 кг Pneuborn-13 обладает 21 степенью подвижности. Как и модель Pneuborn-7II, данный робот полностью автономен и имеет подобную скелетную структуру, но у него нет такого подвижного позвоночника. Гуманоид Pneuborn-13 способен прямо стоять и шагать.
Информация взята с сайта www.robotor.ru


{kind=link}
Последние комментарии