Получение обратной связи в серво постоянного вращения (Life hack)
Многие из нас собирая сових роботов используют сервомашинки постоянного вращения. Это удобно прежде всего потому что они широко доступны, уже имеют встроенный редуктор и управляющую электронику. Часто обычные сервоприводы переделываются под постоянное вращение т.к. они еще более доступны.
Однако наиболее интересная задача которая в стандартном исполнении не решается, это получить обратную связь от вала постоянного вращения. Можно конечно ставить внешние энкодеры то это не всегда удобно. В этой статье рассмотрен вариант использования магнитного энкодера на базе AS5040.
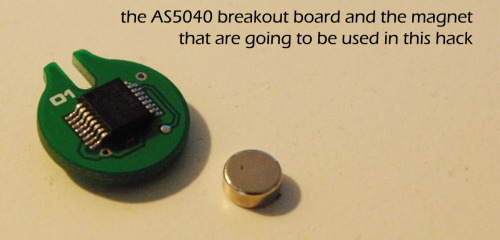

Все что вам понадобиться это собственно энкодер, круглый магнит небольшого диаметра (такие есть на митинском радиорынке и в Чип и Дип ). Кроме того понадобится ряд мелочей которые всегда есть под рукой радиолюбителя. Оригинал статьи на который есть ссылка внизу, подробно по шагам расписывает всю процедуру, я же больше приведу картинки, и основную идею:
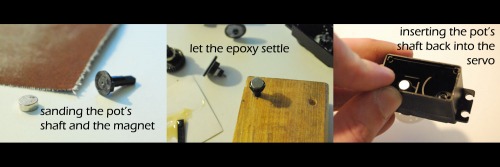
Разбираем серву, извлекаем потенциометр обратной связи и разбираем его. По сути нам нужно аккуратно достать вал.

Выравниваем поверхность вала и приклеиваем на нее магнит. Вставляем вал на место, используя оригинальный корпус потенциометра, не закрывая нижнюю часть.
Фиксируем плату с энкодером на толстом двустороннем скотче, протягиваем провода через дополнительно сделанное отверстие в корпусе.
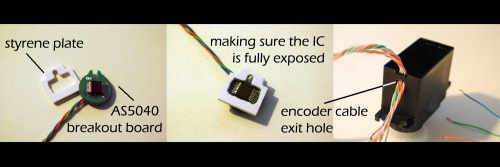
Прилаживаем энкодер снизу корпуса бывшего потенциометра и все собираем.
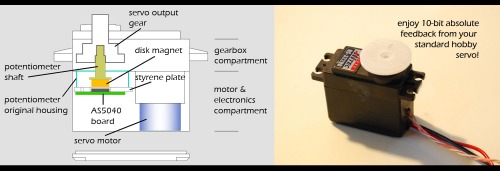
Надо отметить, что потенциометры бывают разные в разных серво, и возможно схему придется менять в конкретных случаях.
С энкодера в итоге мы будем получать вот такой сигнал:
Самые нужные ссылки:
Austrian Microsystems’ AS5040 datasheet visit:http://www.austriamicrosystems.com/eng/Products/Magnetic-Encoders/Rotary-Encoders/AS5040
Плата энкодера в сборе: http://01mech.com/magenc
Оригинал статьи: http://letsmakerobots.com/node/17405



{kind=link}
Последние комментарии