Двуногие роботы: “азиаты” против “европейцев”
Долгое время Япония удерживала мировое господство в производстве «ходячих» роботов гуманоидов. У них есть новаторские роботы Waseda, внушительный ряд роботов HRP, крошечные, но ловкие роботы Sony Qrio и Toyota Partner, и конечно, самый известный «эмиссар» Страны Восходящего Солнца — подобный ребенку-астронавту робот Honda Asimo, который ходит, бегает и поднимается по лестнице с удовлетворительной точностью. До недавнего времени только Южная Корея — с ее роботами Hubo и Mahru — продемонстрировала гуманоидов с ногами столь же внушительными как их японские коллеги.

Теперь и другие страны пытаются нагнать «роботизированных пионеров прямохождения».
Дальше мы рассмотрим четыре двуногих робота-гуманоида, которые вполне могут соревноваться с «азиатами». Стоит отметить, что это вполне «взрослые» представители «робототехнической расы». Мы не учитываем «малышей» типа Nao или составные части механических робототехнических платформ, способные самостоятельно бежать, но не имеющие «туловища». Это роботы, которые могли бы посоревноваться с Asimo в скоростном беге или игре в футбол.
Итак, Робот REEM-B (Рем-Б)
Разработчик – компания Pal Robotics, Барселона, Испания.

Робот REEM-B был сконструирован для ежедневной помощи людям в выполнении простейших задач. Создан в 2008 году. Рост робота — 1.47 метра. Передвигается он относительно медленно — со скоростью 1.5 километров в час. Однако благодаря мощным приводам головок в его ногах и руках, Reem-B является, вероятно, самым сильным гуманоидом в мире. Он может переносить до 12 килограмм полезного груза в каждой руке. Asimo способен на такое?
Робот JUSTIN (Джастин)
Разработчик — Институт Robotics и Mechatronics Немецкого Космического Центра (DLR), г. Oberpfaffenhofen-Wessling, Германия
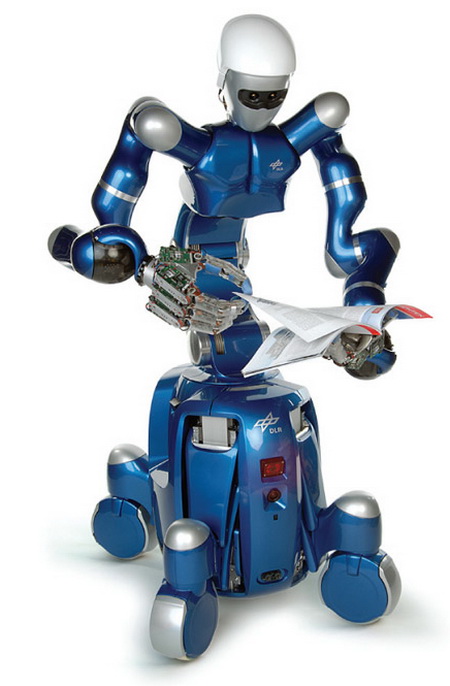
Джастин – безусловно, один из самых внушительных гуманоидов, представленных в последние годы. Его руки странной формы являются удивительно ловкими, и немецкие исследователи последовательно пытаются выйти за границы возможного с точки зрения дизайна аппаратного и программного обеспечения. Работа продолжается и на каждой новой конференции по робототехнике можно ожидать, что Джастин похвастается новой уловкой.
Стоит указать, что Джастин пока не является в полном смысле гуманоидным роботом. Во время последних демонстраций он представлял собой только верхнюю часть тела – голова, две руки и туловище – которые могту быть установлены как на неподвижную основу, так и на четырехколесную мобильную платформу. Но в начале 2010 года исследователи из DLR уже продемонстрировали пару «движущихся конечностей», которые, скорее всего, в самое ближайшее время станут ногами Джастина. При этом в ногах используются те же мощные двигатели, что и в руках робота. Главная идея разработчиков – объединить основанные на вращающем моменте эффекты контроля для двуногого балансирования и ходьбы. Если нижняя часть тела Джастина окажется столь же ловкой как его верхняя часть тела, то этот робот будет в состоянии сделать вещи, которые прежде не делал ни один робот в мире.
РоботCHARLI (Чарли).
Разработчик – Лаборатория Robotics & Mechanisms Политехнического института и университета штата Вирджиния, г Блэксбург, США.
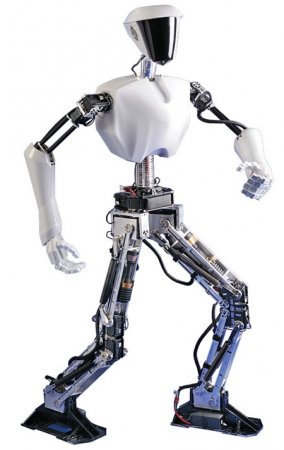
Чарли называют первым многофункциональным автономным передвигающимся гуманоидным роботом в натуральную величину, построенным в Соединенных Штатах. Фактически существуют две модели робота Чарли. Первый, меньший, названный CHARLI-L, использует для передвижения сервомоторы и систему механического привода. Вторая версия, CHARLI-H, более утяжеленная, оборудована специально разработанными линейными приводами, которые будут способны двигаться так же упруго, как человеческие конечности – вместо жесткой фиксации определенных положений. Суть новый разработок исследователи Лабоработии Robotics & Mechanisms пока не раскрывают.
Робот SURENA 2 (Сурена 2)
Разработчик — Университет Advanced Vehicles Center, Тегеран, Иран.

Иранский робот Surena 2 был представленный несколько месяцев назад и на первых порах вызывал к себе скептическое отношение специалистов. Однако он вполне достойно может занять место среди подобных гуманоидных роботов собратьев. Его рост 1.45 метра. Ходит он пока достаточно медленно, но у него есть свои достоинства. Робот умеет наклоняться, стоять на одной ноге и даже выполнять нечто похожее на танец.
Напоследок попытаемся ответить на один из главных вопросов: зачем вообще нужны роботы, которые ходят подобно людям на двух ногах? Ведь мобильная колесная платформа кажется более маневренной, проще и дешевле в производстве! Кажется, необходимость иметь роботов на двух ногах продиктована двумя условиями. Во-первых, если эти роботы предназначены для нашего домашнего или рабочего обихода, то им придется преодолевать различные неровные поверхности – например, лестницы, ворсистые ковровые покрытия. Без «поднимающихся» ног роботам здесь не обойтись. А во-вторых, пытаясь построить ходячих на двух ногах роботов, мы может лучше понять, каким образом движется наше тело – например, как балерине удается балансировать на большом пальце ноги или каратисту совершать ногами разрушительные удары.
Создать гуманоида, способного полностью механически повторять движение каждой мышцы нашего тела – задача не из легких. Исследователи по всему миру бьются над ней уже больше трех десятилетий, и даже то, что достигнуто, кажется лишь маленькими детскими шажками в этом направлении.
Источник: roboting.ru

{kind=link}
Последние комментарии