Робот для реализации тактильного 3-D интерфейса
В лаборатории университета Гифу (Gifu University) в Японии занимаются исследованиями и разработкой сенсорного интерфейса, который в сочетании с 3D-дисплеями, может дать человеку новый способ имитации прикосновения к различным объектам.
Робот HIRO III имеет тактильный робототехнический интерфейс, который позволяет обеспечить человеку реалистичные кинестетические и тактильные ощущения в руках и пальцах пользователя. А 3D-дисплей позволяет «увидеть» одновременно все это на экране.
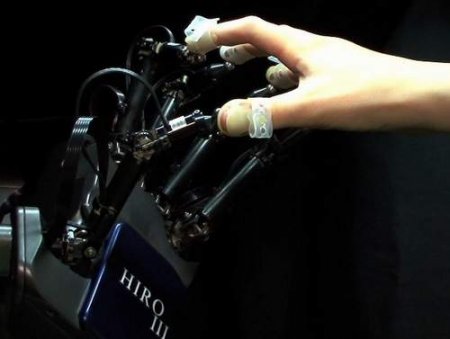
Устройство имеет 15 независимых двигателей, его фаланги дают – в реальном времени – обратную связь к вашей руке, точно имитирующую воздействие (усилие, место воздействия) пользователя на виртуальный 3-D объект.
Посмотрите на видео, как женщина смотрит 3-D изображение на экране, а затем осязает его с помощью HIRO III, где каждый палец человека прикреплен к одному из пальцев робота.
О применении данного устройства. Робот HIRO III был разработан в университете Гифу, где ищут пути применения «осязательных» технологий, например, в обследовании на рак молочной железы. Очевидно, эта система, может иметь большой потенциал для использования в области телемедицины, обучению медицинской диагностике, сексуальных развлечениях, компьютерных играх, а также управлении на расстоянии различными объектами и т.п.
Да. Это уже не первая попытка сделать подобный интерфейс. Вот совсем недавно появилась информация об устройстве Карима Амрани (Karim Amrani). Посмотрите видео, где очень простое механическое устройство объединено с изображением модели руки и изображением модели воздействующих на руку объектов (в данном случае изображение пчел).
В общем, получается своеобразное сочетание виртуальных и реальных ощущений: визуальных и тактильных.
Смотрите видео.
Два соображения по поводу этих устройств.
Во-первых, раздражающе выглядит «механическая схема» этого устройства – инструмента для воздействия на руку. Разве сегодня сложно использовать – вместо малоэффективных механических конструкций – устройства, в которых используются уже давно общеизвестные изобретателям физические эффекты. Например, устройства с ферромагнитными порошками или магнитными (реологическими) жидкостями, другие «умные вещества». Что это дает? Качество управления данным устройством, которое на порядки выше, чем у механического. К тому же появляется возможность изменять/измерять, например, температуру рабочего инструмента…
Во-вторых, можно связать данный интерфейс с работами ученых в больнице Красного Креста в Стокгольме, которые работают над созданием нового типа управляемых мыслью протезных рук с развитыми моторными и сенсорными способностями. Кроме того, ученые надеются, что их протез, через электрическое возбуждение нервов, также будет в состоянии уменьшить призрачные боли.
Тамошние ученые создавали у пациентов иллюзию наличия собственной руки, «касаясь» одновременно окончаний ампутированной руки и касаясь руки-протеза. Так создавалась иллюзия – обман мозга, что сенсорный сигнал прибывал из протезной руки, а не из окончаний ампутированной руки, и что рука принадлежала собственно человеку. В общем, так можно помочь людям ощущать протезную руку, как принадлежащую к их собственному телу.
И тогда, вероятно, можно будет получить новый скачок в развитии технологии интерфейса.
По материалам roboting.ru



{kind=link}
Последние комментарии