Шестиногий проходимец X-RHex
Платформа X-RHex на самом деле не так нова. Однако поскольку у нее есть ощутимые преимущества в проходимости, этот проект активно развивается.
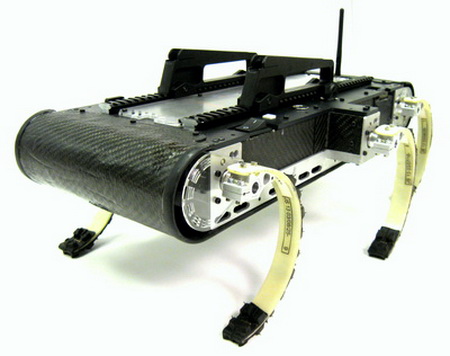
Шесть «лап» робота синхронного вращаются «по три», примерно копируя методику перемещения прочих хексоподов. Только сами ноги представляют собой полукруглые упругие пластины с резиновым покрытием.
Такая конструкция позволяет робоу довольно успешно двигаться и по траве, песку, щебенке, грязи и многим другим типам поверхности которые могут затруднять движение как колесных так и шагающих роботов. При этом конструкция способна преодолевать достаточно заметные относительно собственных размеров препятствия.
https://www.youtube.com/watch?v=VL0aiQAm4RU
Робототехническую платформу сконструировали и продолжают развивать в лаборатории Kodlab UPENN университета Джорджии (США). Первая тестовая модель RHex проходила испытания в пустыне Мохава еще в середине 2008 года. В январе 2011-го сотрудники лаборатории представили усовершенствованную версию мобильной платформы для самоходных роботов. У X-RHex остались те же габариты – 57 см в длину, 39 см в ширину и 7,5 см по высоте. Ширина «лап» — 17,5 см. И хотя общий вес робота тоже остался прежним — 8,6 кг сам робот и 9,5 кг с батареями, увеличилась энергоемкость – теперь он может двигаться по пересеченной местности без подзарядки до двух часов. Увеличилась и «полезная грузоподъемность» робота.
Разработчики считают, что мобильная платформа X-RHex найдет широкое применение как у исследователей предгорий и пустынь, так и у военных – например, в роли разведчиков. Ведь она представляет собой вполне реальную альтернативу робототехническим мобильным платформам на колесном и гусеничном ходу.



{kind=link}
Последние комментарии